




Utforming avfotoniskintegrert krets
Fotoniske integrerte kretser(PIC) utformes ofte ved hjelp av matematiske skript på grunn av viktigheten av banelengde i interferometre eller andre applikasjoner som er følsomme for banelengde.PICproduseres ved å mønstre flere lag (vanligvis 10 til 30) på en wafer, som er sammensatt av mange polygonale former, ofte representert i GDSII-format. Før filen sendes til fotomaskeprodusenten, er det sterkt ønskelig å kunne simulere PIC-en for å bekrefte at designet er korrekt. Simuleringen er delt inn i flere nivåer: det laveste nivået er den tredimensjonale elektromagnetiske (EM) simuleringen, hvor simuleringen utføres på subbølgelengdenivå, selv om interaksjonene mellom atomer i materialet håndteres på makroskopisk skala. Typiske metoder inkluderer tredimensjonal endelig-differanse-tidsdomene (3D FDTD) og egenmodusutvidelse (EME). Disse metodene er de mest nøyaktige, men er upraktiske for hele PIC-simuleringstiden. Det neste nivået er 2,5-dimensjonal EM-simulering, for eksempel endelig-differanse-stråleforplantning (FD-BPM). Disse metodene er mye raskere, men ofrer noe nøyaktighet og kan bare håndtere paraksial forplantning og kan ikke brukes til å simulere resonatorer, for eksempel. Det neste nivået er 2D EM-simulering, som 2D FDTD og 2D BPM. Disse er også raskere, men har begrenset funksjonalitet, for eksempel kan de ikke simulere polarisasjonsrotatorer. Et ytterligere nivå er transmisjons- og/eller spredningsmatrise-simulering. Hver hovedkomponent reduseres til en komponent med inngang og utgang, og den tilkoblede bølgelederen reduseres til et faseforskyvnings- og dempningselement. Disse simuleringene er ekstremt raske. Utgangssignalet oppnås ved å multiplisere transmisjonsmatrisen med inngangssignalet. Spredningsmatrisen (hvis elementer kalles S-parametere) multipliserer inngangs- og utgangssignalene på den ene siden for å finne inngangs- og utgangssignalene på den andre siden av komponenten. I utgangspunktet inneholder spredningsmatrisen refleksjonen inne i elementet. Spredningsmatrisen er vanligvis dobbelt så stor som transmisjonsmatrisen i hver dimensjon. Oppsummert, fra 3D EM til transmisjons-/spredningsmatrise-simulering, presenterer hvert simuleringslag en avveining mellom hastighet og nøyaktighet, og designere velger riktig simuleringsnivå for sine spesifikke behov for å optimalisere designvalideringsprosessen.
Det å stole på elektromagnetisk simulering av visse elementer og bruke en sprednings-/overføringsmatrise for å simulere hele PIC-en garanterer imidlertid ikke en helt korrekt design foran strømningsplaten. For eksempel vil feilberegnede banelengder, multimodusbølgeledere som ikke klarer å effektivt undertrykke moduser av høyere orden, eller to bølgeledere som er for nær hverandre, noe som fører til uventede koblingsproblemer, sannsynligvis ikke bli oppdaget under simuleringen. Selv om avanserte simuleringsverktøy gir kraftige designvalideringsmuligheter, krever det fortsatt en høy grad av årvåkenhet og nøye inspeksjon fra designeren, kombinert med praktisk erfaring og teknisk kunnskap, for å sikre nøyaktigheten og påliteligheten til designet og redusere risikoen for flytskjemaet.
En teknikk kalt sparsom FDTD tillater 3D- og 2D FDTD-simuleringer å utføres direkte på et komplett PIC-design for å validere designet. Selv om det er vanskelig for et elektromagnetisk simuleringsverktøy å simulere en PIC i veldig stor skala, er sparsom FDTD i stand til å simulere et ganske stort lokalt område. I tradisjonell 3D FDTD begynner simuleringen med å initialisere de seks komponentene i det elektromagnetiske feltet innenfor et spesifikt kvantisert volum. Etter hvert som tiden går, beregnes den nye feltkomponenten i volumet, og så videre. Hvert trinn krever mye beregning, så det tar lang tid. I sparsom 3D FDTD, i stedet for å beregne på hvert trinn på hvert punkt i volumet, vedlikeholdes en liste over feltkomponenter som teoretisk kan korrespondere med et vilkårlig stort volum og beregnes bare for disse komponentene. På hvert tidstrinn legges punkter ved siden av feltkomponenter til, mens feltkomponenter under en viss effektterskel fjernes. For noen strukturer kan denne beregningen være flere størrelsesordener raskere enn tradisjonell 3D FDTD. Sparsomme FDTDS-er fungerer imidlertid ikke bra når de håndterer dispersive strukturer fordi dette tidsfeltet sprer seg for mye, noe som resulterer i lister som er for lange og vanskelige å håndtere. Figur 1 viser et eksempel på et skjermbilde av en 3D FDTD-simulering som ligner på en polarisasjonsstråledeler (PBS).
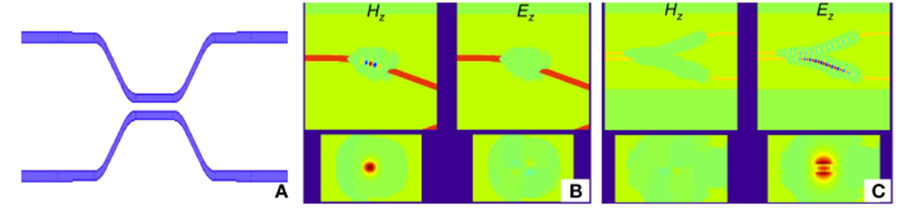
Figur 1: Simuleringsresultater fra 3D sparsom FDTD. (A) er en toppvisning av strukturen som simuleres, som er en retningskopler. (B) Viser et skjermbilde av en simulering ved bruk av kvasi-TE-eksitasjon. De to diagrammene ovenfor viser toppvisningen av kvasi-TE- og kvasi-TM-signalene, og de to diagrammene nedenfor viser det tilsvarende tverrsnittet. (C) Viser et skjermbilde av en simulering ved bruk av kvasi-TM-eksitasjon.
Publisert: 23. juli 2024